
Источник:Goh Rhy Yan наUnsplash
На фоне приложений для обработки данных аэрофотосъемки выделяется Open Drone Map (ODM) – проект с открытым исходным кодом для обработки изображений с беспилотников, разработанный членами OSGEO.
OpenDroneMap позволяет обрабатывать наборы изображений на разных машинах, начиная от ПК и заканчивая виртуальными кластерами и серверами. Выходные данные ODM – это ортофотомозаики, цифровые модели поверхности и рельефа, облака точек и готовые 3D-модели.
Установка и работа с OpenDroneMap
Для пользователей Windows и Mac самый простой способ установки ODM – веб-установщик WebODM, где достаточно просто загрузить изображения, создать задачу и начать рабочий процесс. Много работы направлено на то, чтобы сделать этот инструмент доступным и устойчивым, поэтому этот вариант платный. Такая одноразовая покупка значительно упростит установку и работу с интерфейсом.
Бесплатный вариант с установкой посложнее – это версия ODM через Docker. Это можно сделать на разных ОС, но Linux хорошо подходит для управления пакетами и мало нагружает доступные ресурсы, что увеличивает вычислительную мощность.
Примеры установки и начала работы — в статье от Open Drone Map или в одном из подробных видео.
Рабочий процесс OpenDroneMap
Рабочий процесс ODM делится на несколько этапов. С аэрофотоснимков создается разреженное облако точек, связывающих все изображения вместе. Затем оно преобразуется в плотное трехмерное облако точек. Это позволяет выполнить реконструкцию поверхности, на которую можно нанести текстуру. Поверхность с текстурой используется для построения ортофотомозаики.
Для первого шага в этом процессе ODM использует открытое программное обеспечение от Mapillary. Программное обеспечение сопоставляет несколько снимков одного и того же пространства под разными углами, создавая 3D-информацию из 2D-изображений, в результате чего получается разреженное облако точек.
Следующий шаг – создание на его основе визуально понятного 3D-пространства, где можно различить различные объекты и поверхности. Преобразованное облако точек превращается в поверхность, на которую можно нанести текстуру через реконструкцию Пуассона. Этот метод доступен в библиотеке Point Cloud – крупном открытом проекте по обработке 2D- и 3D-изображений. 3D-поверхность текстурируется путем наложения изображений с использованием алгоритмов, определяющих, какое изображение лучше всего подходит для той или иной области. После этого шага создается конечная ортофотомозаика.
Главное – это доступ к хорошему датасету снимков. Если хотите попробовать работу с OpenDroneMap можете получить доступ к датасетам других пользователей, например, на форуме ODM.
OpenDroneMap 3.0
В конце ноября 2022 вышло обновление ODM 3.0, где основное внимание было уделено улучшению качества выходных данных, удалению некоторых устаревших параметров и устранению давних проблем с программным обеспечением. Посмотрите на изменения в виде списка или в интерактивном сравнении версий.
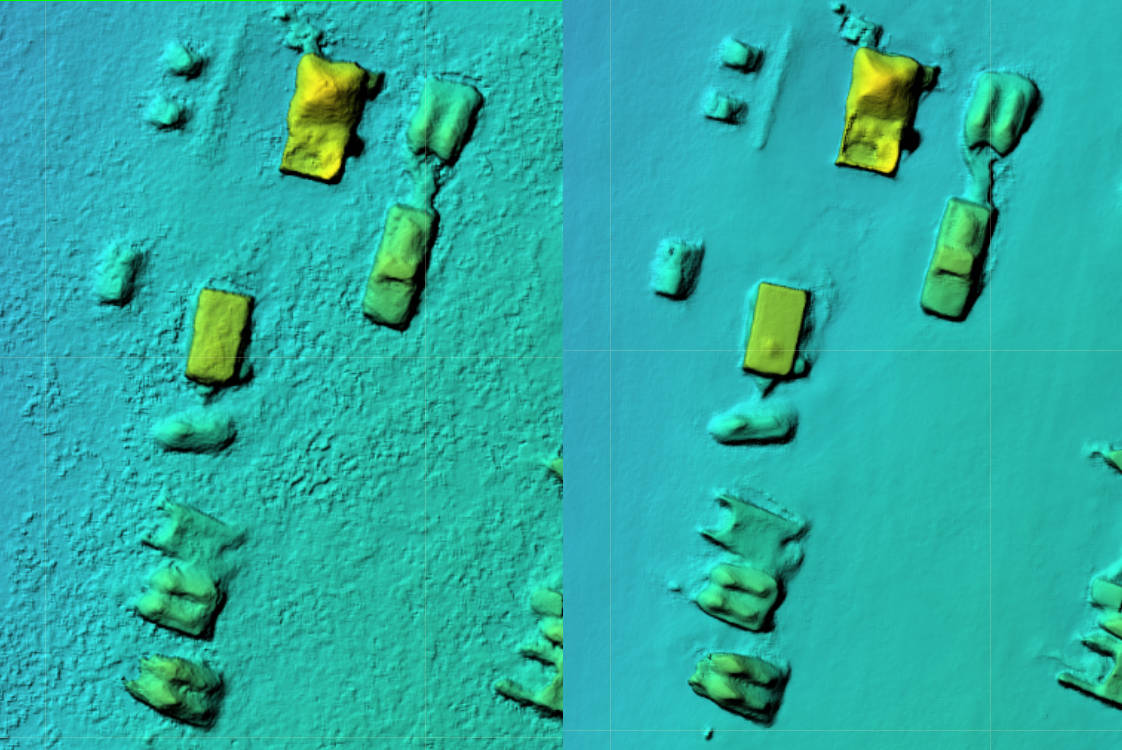
Источник: ODM
ODM 3.0.0 доступен сегодня как самостоятельное приложение или в виде графического интерфейса WebODM, который также поставляется с последней версией ODM. У ODM есть множество дополнительных возможностей – например, использование наземных контрольных точек для повышения пространственной точности. Если хотите узнать больше, загляните в базу знаний и на форум ODM.
Источники:
- OpenDroneMap: a Toolkit for Processing Aerial Drone Imagery – Eric Van Rees – 2017.
- Get ready, ODM 3.0 is here! – Pierotofy – November 28, 2022.
- Open Drone Map — Local and Urban Scale Mapping Available to All – Amos J Bennett – May 6, 2021.
