Время прочтения: 1 минута
Алгоритмы поиска маршрутов на карте ищут самые быстрые пути для передвижения или для оптимизации логистики. Они автоматически показывают выгодный путь между точками, чтобы люди не считали расстояния и факторы вручную. Но как они строят маршруты? Пока не увидишь своими глазами, понять это сложно, поэтому разработчик Jan Pánek создал для них простой визуализатор.
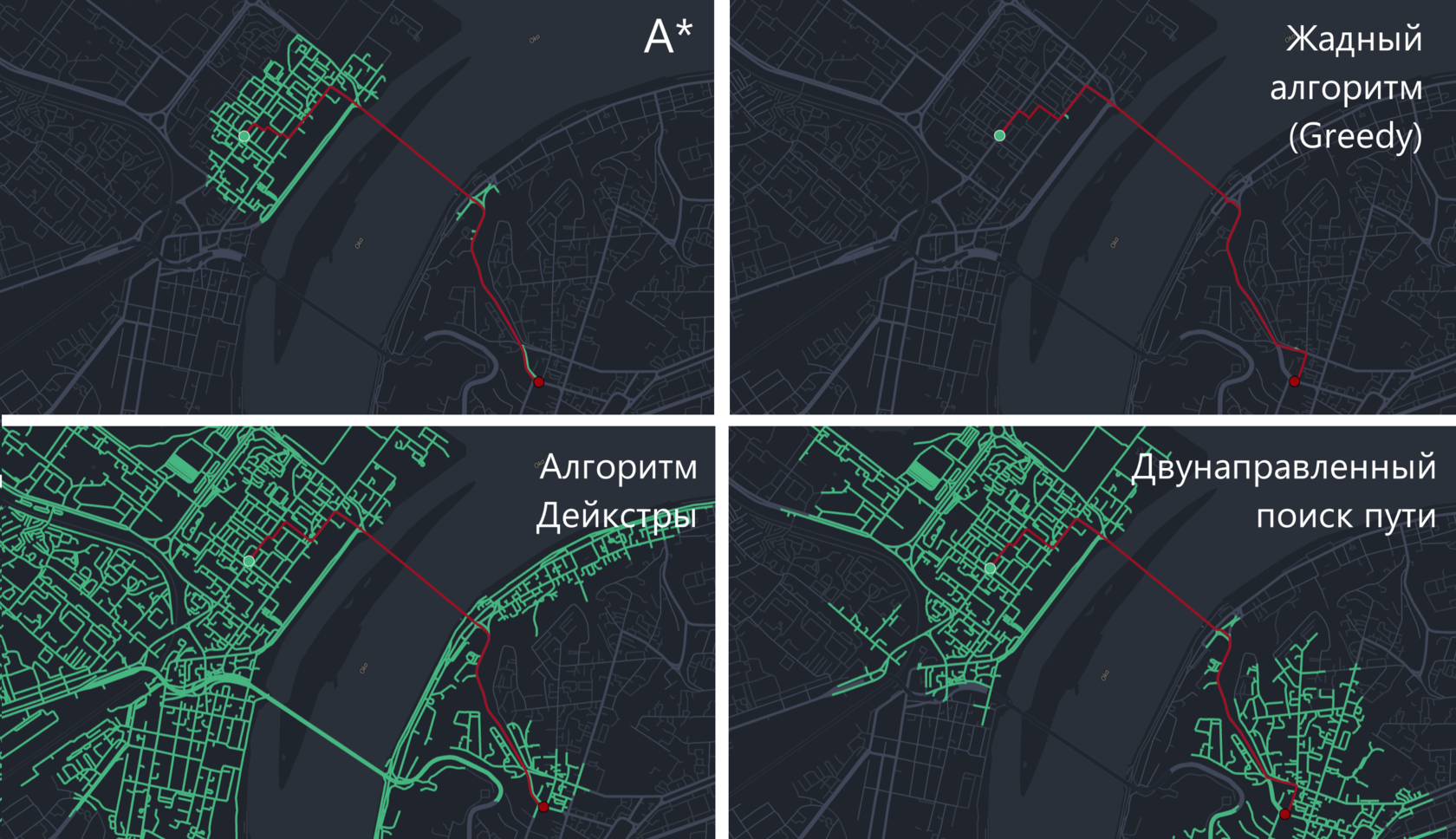
Pathfinding Visualizer — это интерактивный инструмент поиска самого короткого маршрута между любыми двумя точками. Здесь можно выбрать две точки в своем городе и посмотреть на работу четырех алгоритмов: A*, жадный алгоритм, алгоритм Дейкстры и двунаправленный поиск пути.
Все просто: кликаете начальную точку на карте, затем вторым кликом выбираете конечную, нажимаете кнопку запуска сверху страницы и смотрите, как алгоритм выбирает наиболее эффективный маршрут между двумя точками на карте OpenStreetMap. Выбрать алгоритм можно в боковой панели слева, и там же можно поменять цвета визуализаций.
Материал подготовила Юлия Федорова
